



igbt模塊驅動線路優化辦法解析
igbt模塊驅動線路優化辦法解析
2021-05-18
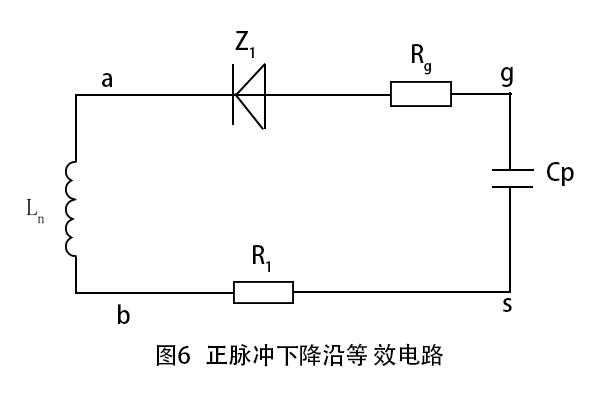
圖1中用框標明的線路便是對原來驅動線路的優化。借助在門極添加穩壓管、二極管、電容和電阻,能夠比較好地吸收上升沿、下降沿和尖峰。 由圖3和圖4對比能夠得出,在較小延時的情形下,應把尖峰減到最低。從圖3能夠得出,要降低的尖峰主要是負脈沖后沿的過沖尖峰,由于這一尖峰極有可能超過igbt模塊的導通電壓(Vth),如此便會導致同一橋臂的兩種igbt模塊直通;另外由圖5能夠得出,在滿負載(600V/30A)情況下,驅動波型具備不錯的穩定性,并且沒有大的尖峰,這就保障了igbt模塊穩定、安全的工作。驅動等效線路如圖6所示。當中,Lm為變壓器次邊的勵磁電感;Z1為穩壓管(其反方向等同于1個二極管,因此圖上就...
了解詳情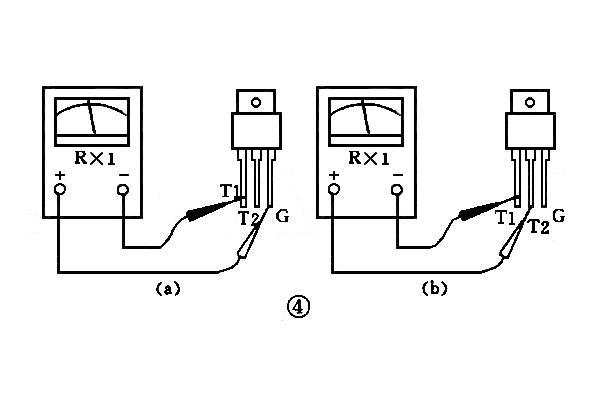
雙向可控硅模塊的檢測
雙向可控硅模塊的檢測
2021-05-17
可控硅分單向可控硅模塊、雙向可控硅模塊。雙向可控硅模塊有第1陽極A1(T1),第2陽極A2(T2)、控制極G3個引出腳。雙向可控硅模塊第1陽極A1與第2陽極A2間,不管所加電壓極性是正方向還是反方向,只要控制極G和第1陽極A1間加有正負極性不同的觸發電壓,就可觸發導通呈低阻模式。這時A1、A2間壓降也約為1V。雙向可控硅模塊一旦導通,即便失去觸發電壓,也能繼續保持導通模式。唯有當第1陽極A1、第2陽極A2電流降低,低于維持電流或A1、A2間當電壓極性轉變且沒有觸發電壓時,雙向可控硅模塊才斷開,這時唯有重新加觸發電壓才能導通。 用數字萬用表電阻值R*1Ω擋,用紅、黑兩表筆各自測任意兩引腳間正反向電阻值,結果當中...
了解詳情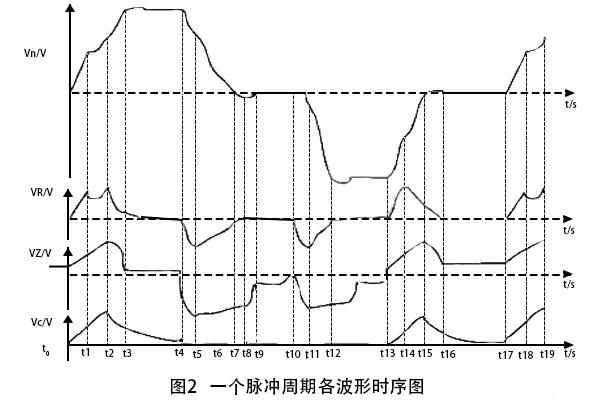
igbt模塊強驅動線路的設計
igbt模塊強驅動線路的設計
2021-05-17
圖2是一個脈沖周期,當正脈沖上升沿(t0~t3)來臨時(這兒只考量正脈沖),電容C等同于短路,利用二極管D和電容C能夠給igbt模塊供應很大的瞬間電流,把驅動脈沖的上升時間減短。 圖2中正脈沖便是igbt模塊的驅動信號,這一負脈沖的上升沿也是由另一個一條線驅動脈沖感應來的,因此所要探討的便是另一條線驅動脈沖的下降沿尖峰,這4路輸出脈沖是相同的,因此只需探討一條線。但為了能直觀、完整,這兒就把它當作是本路負脈沖的上升沿來探討(下邊提及的負脈沖都是這類情形)。自然穩壓管這一條線路也是有電流流過,但與加速電容C這一條線路對比就比較小。若不添加電阻R,這一電容會通過幾個脈沖周期充滿電荷,而喪失加速功效,因此規...
了解詳情
單向可控硅模塊的檢測
單向可控硅模塊的檢測
2021-05-14
可控硅分單向可控硅模塊、雙向可控硅模塊。單向可控硅模塊有陽極A、陰極K、控制極G3個引出腳。唯有當單向可控硅模塊陽極A與陰極K中間加有正方向電壓,并且控制極G與陰極間加所需要的正方向觸發電壓時,才能被觸發導通。這時A、K間呈低阻導通模式,陽極A與陰極K間壓降約1V。單向可控硅模塊導通后,控制器G即便失去觸發電壓,要是陽極A和陰極K中間仍保持正方向電壓,單向可控硅模塊仍然處在低阻導通模式。唯有把陽極A電壓拆卸或陽極A、陰極K間電壓極性發生改變(交流過零)時,單向可控硅模塊才由低阻導通模式變換為高阻截止模式。單向可控硅模塊一旦截止,即便陽極A和陰極K間又重新加正方向電壓,仍需在控制極G和陰極K間有重新加正方向觸發電壓才能...
了解詳情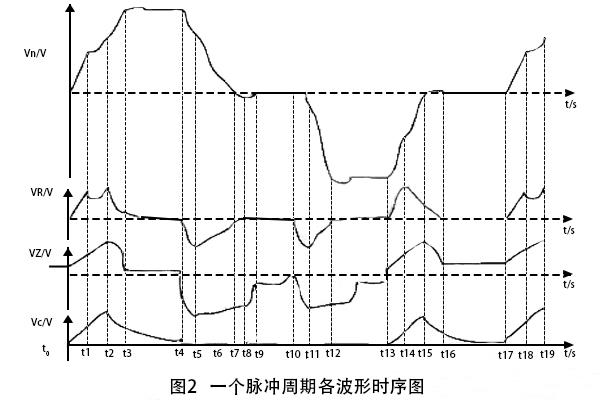
igbt模塊驅動線路存在的不足
igbt模塊驅動線路存在的不足
2021-05-14
在中頻脈沖滲碳電源中,能快速建立過流保護是首要的,而驅動脈沖無延緩地傳遞,對即時過流保護起關鍵作用;另外為了降低開關損耗,還需很陡的驅動脈沖上升沿和下降沿;某些特殊場所需緊湊而簡潔、不附加驅動電源等。綜合考慮到上述需,選擇變壓器隔離全橋驅動線路,其線路如圖1所示。 圖1中2個橋臂各選擇1個N-MOSFET和1個P-MOSFET。兩路PWM控制信號1或2為高電平時,即1為高電平,2為低電平,Q1和Q4關斷,Q2和Q3導通,Q5導通。這時,Q2,Q3和T1的原邊繞組就建立通道,脈沖電壓加在T1的原邊,相對的次邊會獲得驅動脈沖信號。1,2都為低電平時,Q1,Q2會另外導通,T1原邊被短路,則次邊無脈沖輸出。...
了解詳情

版權所有 Copyright(C)2009-2020 傳承電子科技(江蘇)有限公司 蘇ICP備13063025號-1